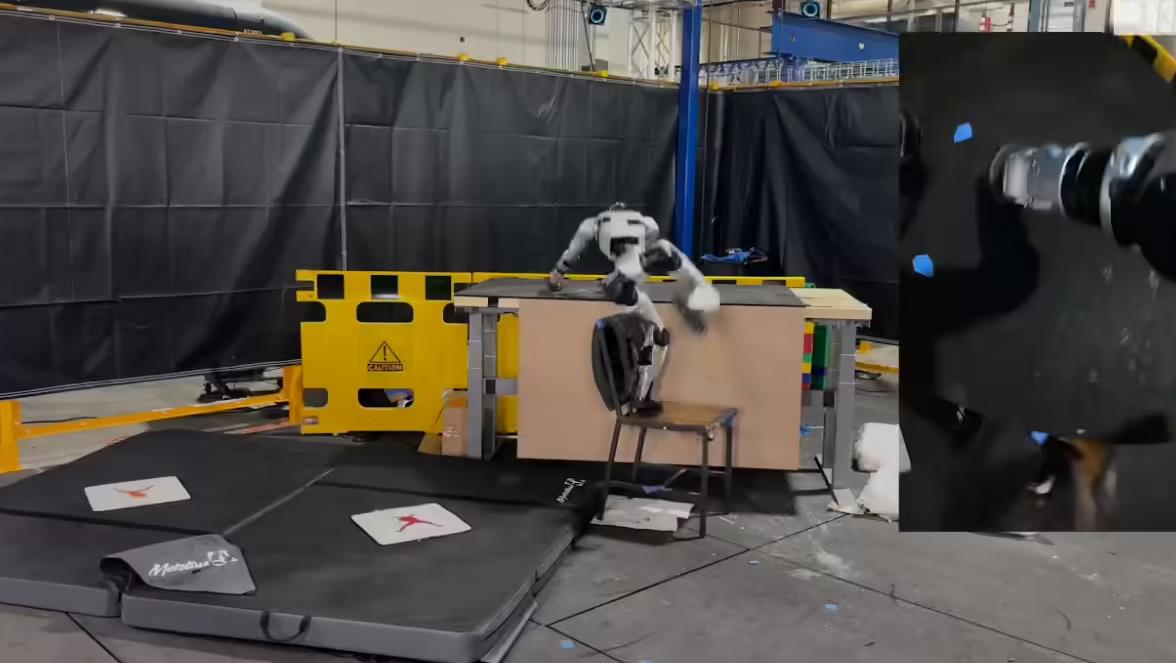
questa settimana, i team di ricerca di amazon far labs, mit, università della california, berkeley, università di stanford e carnegie mellon university hanno annunciato il lancio di una nuova tecnologia rivoluzionaria, il "motore di generazione di dati per la preservazione delle interazioni omniretarget". questa tecnologia consente al robot umanoide yushu g1 di eseguire sequenze di azioni complesse basate esclusivamente sulla propriocezione, senza affidarsi a sistemi di visione o lidar. nel video dimostrativo, il robot non solo sale su un tavolo usando una sedia come trampolino di lancio, ma esegue anche rotolamenti in stile parkour per attenuare l'impatto all'atterraggio, mostrando le sue impressionanti capacità motorie.
l'innovazione fondamentale di omniretarget risiede nella sua tecnologia di mesh di interazione, che modella e preserva accuratamente le relazioni spaziali e di contatto tra il robot, il terreno e gli oggetti con cui interagisce. soddisfacendo rigorosamente i vincoli cinematici e minimizzando le differenze di deformazione tra le mesh di movimento umane e robotiche, il sistema genera traiettorie fisicamente accurate. il team di ricerca ha condotto la validazione su diversi set di dati, generando dati di traiettoria di alta qualità per un periodo di oltre 9 ore. in termini di fattibilità delle azioni e stabilità del contatto, le prestazioni superano di gran lunga quelle dei metodi convenzionali.
grazie a questo risultato rivoluzionario, il robot può ora imparare sequenze di azioni complesse della durata massima di 30 secondi con soli cinque parametri di ricompensa e una semplice randomizzazione ambientale. oltre alle azioni dimostrate di salire sul tavolo e rotolare, il sistema può anche supportare otto diversi stili di manipolazione degli oggetti. il team di ricerca ha dichiarato che questa strategia di controllo basata esclusivamente sulla propriocezione ha un significativo valore applicativo in ambienti estremi in cui i sensori di visione non funzionano, aprendo la strada alla futura implementazione pratica di robot umanoidi in scenari come il salvataggio in caso di disastri e l'esplorazione.